歡迎來到眾智博遠(yuǎn)官網(wǎng)網(wǎng)站!

發(fā)布時(shí)間:2019-08-24 來源:眾智博遠(yuǎn)
使用STARTER / SCOUT調(diào)試
在 SIMATIC Manager 中鼠標(biāo)右鍵點(diǎn)擊SINAMICS_CU310_PN ,選擇“open object”,可通過STARTER/SCOUT調(diào)試工具將CU310_PN 項(xiàng)目打開。

圖 10.
可通過使用"Automatic configuration"對(duì)驅(qū)動(dòng)裝置在線進(jìn)行自動(dòng)配置。配置結(jié)束后通過"Copy RAM to ROM"將參數(shù)存貯至CF卡中。
本例中:
? 驅(qū)動(dòng)裝置選擇報(bào)文“telegram 1 ”。
? CU單元選擇報(bào)文“telegram 390。
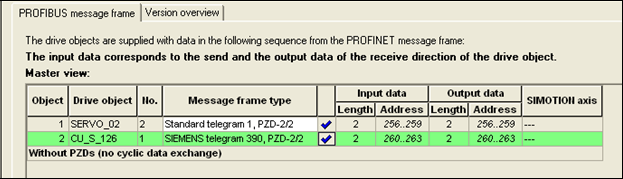
圖 11.
CU參數(shù)化:
鼠標(biāo)右鍵點(diǎn)擊"CU_S_126" ,選擇"Expert => Expert list"打開專家參數(shù)列表,可改變下列參數(shù):
? P728.8 = output: DI/DO 8 可用于數(shù)字量輸出 (如果p922=390,自動(dòng)設(shè)置
p738=2091.0)。
? P922: PROFIBUS PZD SIEMENS telegram 390 (390)。
? p2104 BI: 2. Acknowledge faults SERVO_02 : r2090.7。
通過PN總線對(duì)電機(jī)起、停及速度控制
S7-300/400PLC通過PROFINET周期性通訊方式將控制字1(CTW1)和主設(shè)定值(NSETP_B)發(fā)送至驅(qū)動(dòng)器。
(1) 控制字中Bit0做電機(jī)的起、停控制。
(2) 主設(shè)定值為速度設(shè)定值,頻率設(shè)定值和實(shí)際值要經(jīng)過標(biāo)準(zhǔn)化,使得4000H(十六進(jìn)制)對(duì)應(yīng)于100%,發(fā)送的最高頻率(最大值)為7FFFH(200%)。可以在P2000中修改參考頻率(缺省值為50Hz)。
(3) 當(dāng)組態(tài)的報(bào)文結(jié)構(gòu) PZD=2或自由報(bào)文999時(shí),在S7-300/400 中可用“MOVE”指令進(jìn)行數(shù)據(jù)傳送;當(dāng)組態(tài)的報(bào)文結(jié)構(gòu) PZD〉2,在S7-300/400 中需調(diào)用SFC14和SFC15系統(tǒng)功能塊。
? SFC14(“DPRD_DAT”)用于讀驅(qū)動(dòng)裝置的過程數(shù)據(jù)。
? SFC15(“DPWR_DAT”)用于將過程數(shù)據(jù)寫入驅(qū)動(dòng)裝置。
例子:SERVO_02 ”控制字、主設(shè)定值的發(fā)送及狀態(tài)字、實(shí)際頻率的讀取程序
(1) 控制驅(qū)動(dòng)器運(yùn)行:
通過先發(fā)送控制字(STW1)047E然后發(fā)送047F來啟動(dòng)驅(qū)動(dòng)器,該數(shù)據(jù)控制字在DB10.DBW4(見圖13)中指定,主設(shè)定值在DB10.DBD6中設(shè)定,運(yùn)行信號(hào)為M1.0。這些值均通過變量表“Drive_Run”設(shè)定及監(jiān)控。控制程序見圖12。
(2)停止驅(qū)動(dòng)器:
應(yīng)發(fā)送控制字047E至驅(qū)動(dòng)器。
(3)讀取驅(qū)動(dòng)器狀態(tài)字及頻率實(shí)際值:
PLC接收狀態(tài)字1(ZSW1),存放在DB10.DBW0中;接收驅(qū)動(dòng)器傳來的頻率實(shí)際值,存放在DB10.DBW2中。

圖12. 控制程序

官網(wǎng)")
