歡迎來到眾智博遠(yuǎn)官網(wǎng)網(wǎng)站!

發(fā)布時(shí)間:2019-08-24 來源:眾智博遠(yuǎn)
1 概述
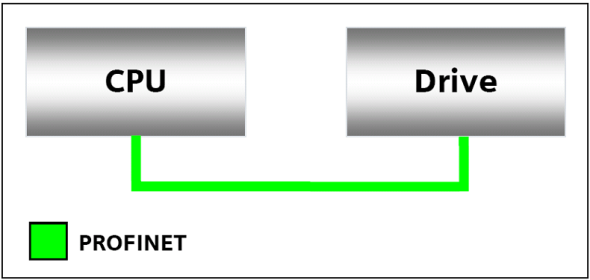
圖1.
如圖1 所示:可以在 SIMATIC CPU 和 SINAMICS S120 驅(qū)動(dòng)之間實(shí)現(xiàn) PROFINET IRT 等時(shí)同步通訊。通過這種通訊方式可以實(shí)現(xiàn)多個(gè) SINAMICS S120 驅(qū)動(dòng)同時(shí)發(fā)送和接收數(shù)據(jù),也可以實(shí)現(xiàn)多個(gè) SINAMICS S120 驅(qū)動(dòng)軸的同步運(yùn)行。
SIMATIC CPU 做為PROFINET IRT IO controller, SINAMICS S120 做為 PROFINET IRT IO device。
SIMATIC CPU 按照?qǐng)?bào)文的定義發(fā)送控制字或給定值;SINAMICS S120 則發(fā)送狀態(tài)字或?qū)嶋H速度、位置等狀態(tài)信號(hào)。
2 硬件配置以及軟硬件的要求
2.1 硬件配置
硬件配置如圖2所示:
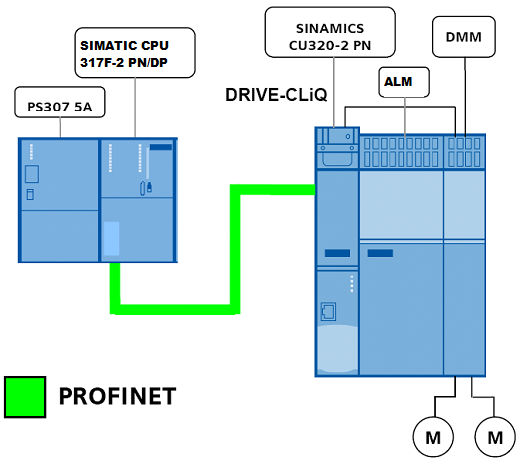
圖2.
2.2 軟硬件的要求
示例程序所采用的硬件如表1所示:
| 組件 | 數(shù)量 | 訂貨號(hào) | 注意事項(xiàng) |
| SIMATIC CPU 317F-2 PN/DP | 1 | 6ES7317-2EK14-0AB0 | V3.2.6 |
| SINAMICS S120 CU320-2 PN | 1 | 6SL3040-1MA01-0AA0 | V4.4.2 |
| SINAMICS Motor Module | 1 | 6SL3120-2TE13-0AA3 | |
| SINAMICS ALM | 1 | 6SL3130-7TE21-6AA3 | |
| Motor | 2 | 1FK7022-5 AK71-1DG0 |
表1.
要實(shí)現(xiàn)SIMATIC CPU 和 SINAMICS S120 的 PROFINET IRT 等時(shí)同步通訊,對(duì)軟硬件版本要求如表2所示:
| 組件 | 版本 | 注意事項(xiàng) |
| STEP7 | V5.5 HF4 | - |
| STARTER | V4.2 | - |
| Drive ES Basic | V5.4+SP5 | - |
| SIMOTION SCOUT | V4.2.1.0 | - |
| S7-300 CPU Firmware | V3.2 | - |
| S7-400 CPU Firmware | V6.0 | - |
| SINAMICS S120 Firmware | V4.4 | - |
表2.
3 項(xiàng)目的配置
3.1 SIMATIC CPU 硬件配置
打開 STEP7 SIMATIC Manager,創(chuàng)建一個(gè)新的項(xiàng)目并插入一個(gè)新的 SIMATIC 300站。如圖3所示:
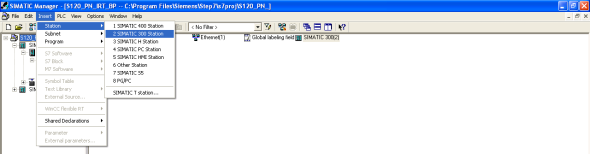
圖3.
選擇 SIMATIC CPU 317F-2 PN/DP V3.2,如圖4所示:
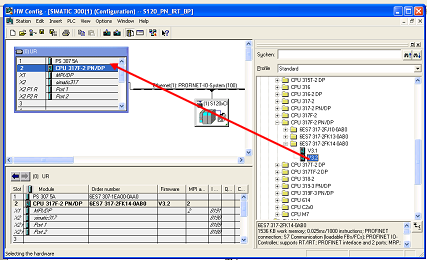
圖4.
創(chuàng)建一個(gè)新的 Ethernet 網(wǎng)絡(luò)并分配 IP 地址,如圖5所示:

圖5.
雙擊 PROFINET 接口來打來屬性窗口,定義 device name,如圖6所示:
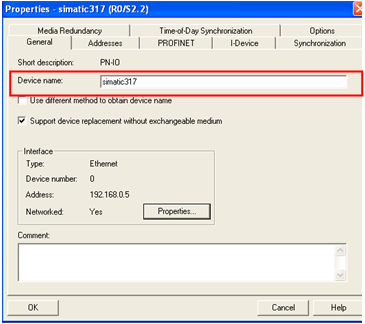
圖6.
3.2 SINAMICS S120 硬件配置
將 SINAMICS CU320-2 PN V4.4 拖拽到 PROFINET 網(wǎng)絡(luò),如圖7如示:

圖7.
給 SINAMICS CU320-2 PN V4.4 分配 IP 地址,如圖8如示:
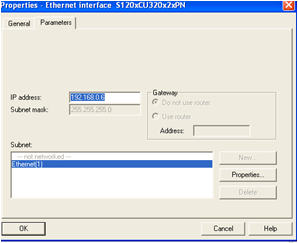
圖8.
雙擊 SINAMICS S120 打開屬性窗口,定義 device name,如圖9如示:

圖9.
Device name 被分配到 SINAMICS S120,如圖10所示:
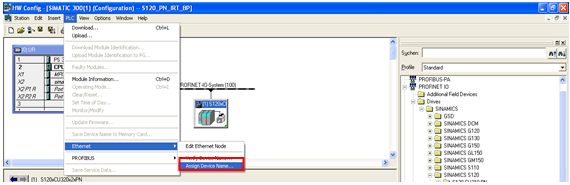
圖10.
3.3 等時(shí)同步通訊配置
打開PROFINET IO Domain Management,如圖11所示:
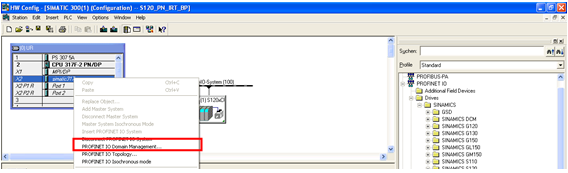
圖11.
選擇 SIMATIC CPU 和 SINAMICS S120,并打開其屬性,如圖12所示:

圖12.
將 SIMATIC CPU 設(shè)置為 Sync master,將 SINAMICS S120 設(shè)置為 Sync slave,如圖13所示:
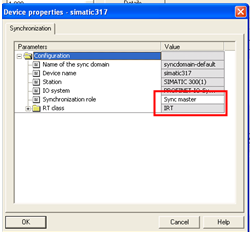
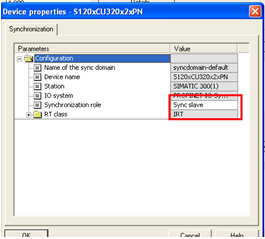
圖13.
設(shè)置 PROFINET IRT 網(wǎng)絡(luò)的拓?fù)洌鐖D14所示:
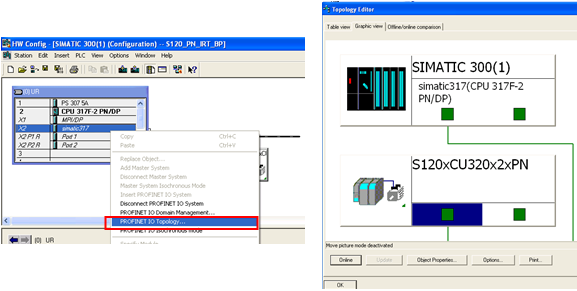
圖14.
為了實(shí)現(xiàn) PROFINET IRT 等時(shí)同步通訊,調(diào)用 OB61,并對(duì)其進(jìn)行相關(guān)的設(shè)置,如圖15所示,打開SIMATIC CPU 的屬性:
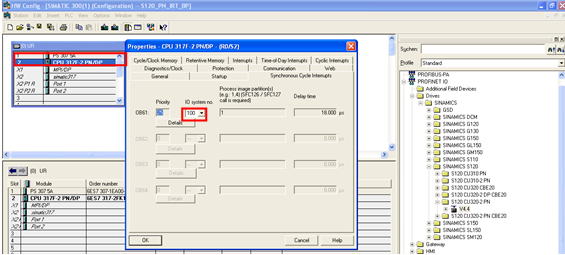
圖15.
選擇詳細(xì)的屬性設(shè)置,設(shè)置 Process image partition =1,這樣被分配到過程映像區(qū)的輸入輸出數(shù)據(jù)在每一個(gè)總線周期中就被同步更新。在 OB61 中可以訪問這些輸入輸出數(shù)據(jù)。如圖16所示:
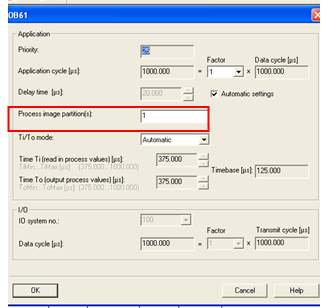
圖16.
為了實(shí)現(xiàn) SINAMICS S120 的等時(shí)同步通訊,需要打開 PROFINET 接口(PN IO)屬性窗口,如圖17所示:
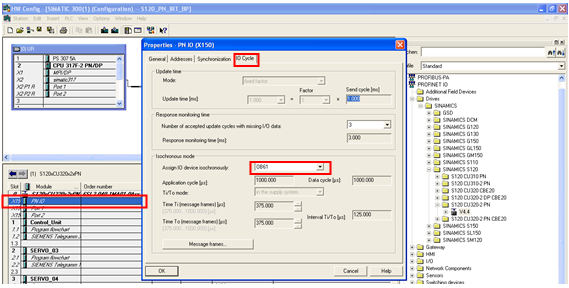
圖17.
選擇標(biāo)準(zhǔn)111報(bào)文,并將報(bào)文的輸入輸出地址分配到過程映像區(qū) PtP1。如圖18所示:
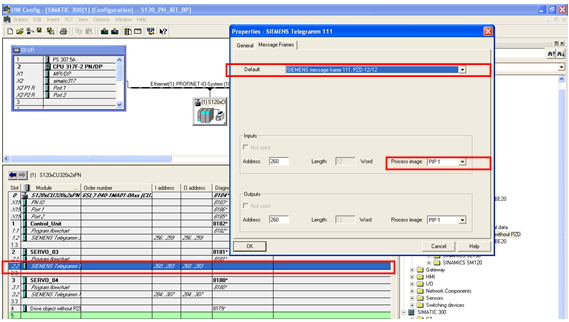
圖18.
3.4 SINAMICS S120 的配置
用 STARTER 或 SIMOTION SCOUT 完成 SINAMICS S120 的配置和組態(tài),SINAMICS S120 配置和組態(tài)的詳細(xì)過程請(qǐng)參見下載的文檔 A0439 (SINAMICS S120 調(diào)試手冊(cè)) 。
為了通過 PROFINET IRT 通訊實(shí)現(xiàn)兩個(gè)驅(qū)動(dòng)軸的同步運(yùn)行,示例程序中兩個(gè)驅(qū)動(dòng)軸均
選擇標(biāo)準(zhǔn)111報(bào)文,并了基本定位功能。通過 MDI 的速度模式來實(shí)現(xiàn)對(duì)兩個(gè)驅(qū)動(dòng)軸的控制。驅(qū)動(dòng)軸報(bào)文的配置如圖19所示:
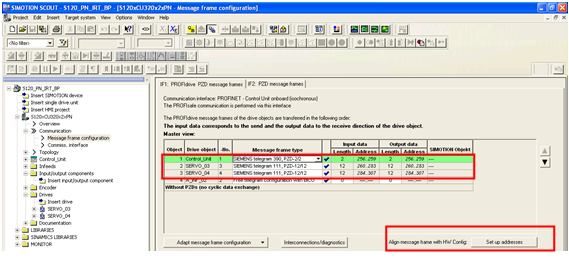
圖19.
4 編寫程序
在完成 SIMATIC CPU 和 SINAMICS S120 的配置以后,就需要在OB61 中編寫程序,整個(gè)程序分為四個(gè)部分:1. 調(diào)用 SFC126 刷新輸入過程映像區(qū);2. 按照 111 報(bào)文的時(shí)序要求,實(shí)現(xiàn)對(duì)兩個(gè)驅(qū)動(dòng)軸的MDI 速度控制;3. 產(chǎn)生兩個(gè)驅(qū)動(dòng)軸控制字2(STW2)第12~15位的生命標(biāo)志;4. 調(diào)用 SFC127 刷新輸出過程映像區(qū)。
官網(wǎng)")
