歡迎來到眾智博遠(yuǎn)官網(wǎng)網(wǎng)站!

發(fā)布時(shí)間:2019-08-24 來源:眾智博遠(yuǎn)
西門子S7-1200 PLC在當(dāng)前的市場(chǎng)中有著廣泛的應(yīng)用,作為常與變頻器共同使用的PLC,其與西門子MM440 變頻器的USS通信一直在市場(chǎng)上有著非常廣泛的應(yīng)用。本文將主要介紹如何使用USS通信協(xié)議來實(shí)現(xiàn)S7-1200與MM440變頻器的通信。
1. USS通信介紹
1.1. USS協(xié)議特點(diǎn)
USS (Universal Serial Interface, 即通用串行通信接口) 是西門子專為驅(qū)動(dòng)裝置開發(fā)的通信協(xié)議。USS 協(xié)議的基本特點(diǎn)如下:
? 支持多點(diǎn)通信(因而可以應(yīng)用在 RS 485 等網(wǎng)絡(luò)上)
? 采用單主站的“主-從”訪問機(jī)制
? 每個(gè)網(wǎng)絡(luò)上多可以有 32 個(gè)節(jié)點(diǎn)(多 31 個(gè)從站)
? 簡(jiǎn)單可靠的報(bào)文格式,使數(shù)據(jù)傳輸靈活
? 容易實(shí)現(xiàn),成本較低
USS 的工作機(jī)制是,通信總是由主站發(fā)起,USS 主站不斷循環(huán)輪詢各個(gè)從站,從站根據(jù)收到的指令,決定是否以及如何響應(yīng)。從站永遠(yuǎn)不會(huì)主動(dòng)發(fā)送數(shù)據(jù)。從站在以下條件滿足時(shí)應(yīng)答:
-- 接收到的主站報(bào)文沒有錯(cuò)誤,并且
-- 本從站在接收到主站報(bào)文中被尋址
上述條件不滿足,或者主站發(fā)出的是廣播報(bào)文,從站不會(huì)做任何響應(yīng)。對(duì)于主站來說,從站在接收到主站報(bào)文之后的一定時(shí)間內(nèi)發(fā)回響應(yīng)。否則主站將視為出錯(cuò)。
USS 的字符傳輸格式符合 UART 規(guī)范,即使用串行異步傳輸方式。USS 在串行數(shù)據(jù)總線上的字符傳輸幀為 11 位長度,如表1所示:

表1:USS字符幀
USS 協(xié)議的報(bào)文簡(jiǎn)潔可靠,靈活。報(bào)文由一連串的字符組成,協(xié)議中定義了它們的特
定功能,表2所示:

表2:USS報(bào)文結(jié)構(gòu)
每小格代表一個(gè)字符(字節(jié))。其中:
STX: 起始字符,總是 02 h
LGE: 報(bào)文長度
ADR:從站地址及報(bào)文類型
BCC: BCC 校驗(yàn)符
凈數(shù)據(jù)區(qū)由 PKW 區(qū)和 PZD 區(qū)組成,如表3所示:

表3:USS凈數(shù)據(jù)區(qū)
PKW: 此區(qū)域用于讀寫參數(shù)值、參數(shù)定義或參數(shù)描述文本,并可修改和報(bào)告參數(shù)的改變 。其中:
PKE: 參數(shù) ID。包括代表主站指令和從站響應(yīng)的信息,以及參數(shù)號(hào)等
IND: 參數(shù)索引,主要用于與 PKE 配合定位參數(shù)
PWEm:參數(shù)值數(shù)據(jù)
PZD: 此區(qū)域用于在主站和從站之間傳遞控制和過程數(shù)據(jù)。控制參數(shù)按設(shè)定好的固定格式在主、從站之間對(duì)應(yīng)往返。如:
PZD1:主站發(fā)給從站的控制字/從站返回主站的狀態(tài)字
PZD2: 主站發(fā)給從站的給定/從站返回主站的實(shí)際反饋
根據(jù)傳輸?shù)臄?shù)據(jù)類型和驅(qū)動(dòng)裝置的不同,PKW 和 PZD 區(qū)的數(shù)據(jù)長度都不是固定的,它們可以靈活改變以適應(yīng)具體的需要。但是,在用于與控制器通信的自動(dòng)控制任務(wù)時(shí),網(wǎng)絡(luò)上的所有節(jié)點(diǎn)都要按相同的設(shè)定工作,并且在整個(gè)工作過程中不能隨意改變。
注意:
對(duì)于不同的驅(qū)動(dòng)裝置和工作模式,PKW 和 PZD 的長度可以按一定規(guī)律定義。 一旦確定就不能在運(yùn)行中隨意改變 ;
PKW 可以訪問所有對(duì) USS 通信開放的參數(shù);而 PZD 僅能訪問特定的控制和過程數(shù)據(jù);
PKW 在許多驅(qū)動(dòng)裝置中是作為后臺(tái)任務(wù)處理,因此 PZD 的實(shí)時(shí)性要比 PKW 好。
1.2. S7-1200 USS通信簡(jiǎn)介
CM 1241 RS485 模塊通過 RS485 端口與MM440進(jìn)行通信。 可使用 USS 庫控制MM440和讀/寫MM440參數(shù)。該庫提供 1 個(gè) FB 和 3 個(gè) FC 來支持 USS 協(xié)議。 每個(gè) CM1241 RS485 通信模塊多支持 16 個(gè)MM440。連接到一個(gè) CM 1241 RS485 的所有MM440(多 16 個(gè))是同一 USS 網(wǎng)絡(luò)的一部分。連接到另一 CM 1241 RS485 的所有MM440是另一 USS 網(wǎng)絡(luò)的一部分。 因?yàn)?S7-1200多支持三個(gè) CM 1241 RS485 設(shè)備,所以用戶多可建立三個(gè) USS 網(wǎng)絡(luò),每個(gè)網(wǎng)絡(luò)多 16 個(gè)MM440,總共支持 48 個(gè) USS MM440。各 USS 網(wǎng)絡(luò)使用各自的數(shù)據(jù)塊進(jìn)行管理(使用三個(gè) CM 1241 RS485 設(shè)備建立三個(gè) USS網(wǎng)絡(luò)需要三個(gè)數(shù)據(jù)塊)。 同一USS 網(wǎng)絡(luò)相關(guān)的所有指令共享該數(shù)據(jù)塊。 這包括用于控制網(wǎng)絡(luò)上所有MM440的 USS_DRV、USS_PORT、USS_RPM 和USS_WPM 指令。
2. 硬件需求及接線
2.1. 硬件需求
S7-1200 PLC目前有3種類型的CPU:
1)S7-1211C CPU。
2)S7-1212C CPU。
3)S7-1214C CPU。
這三種類型的CPU都可以使用USS通信協(xié)議通過通信模塊CM1241 RS485來實(shí)現(xiàn)S7-1200與MM440變頻器的通信。
本例中使用的PLC硬件為:
1) S7-1214C ( 6ES7 214 -1BE30 -0XB0 )
2) CM1241 RS485 ( 6ES7 241 -1CH30 -0XB0 )
3) CSM 1277 ( 6GK7 277 -1AA00 - 0AA0)
本例中使用的MM440變頻器硬件為:
1) MM440 ( 6SE6440 - 2AB11 - 2AA1 )
2) MICROMASTER 4 ENCODER MODULE ( 6SE6400 - 0EN00 - 0AA0 )
3) SIEMENS MOTOR ( 1LA7060 - 4AB10 - Z )
4) USS 通信電纜 ( 6XV1830 - 0EH10 )
2.2. 接線
建議使用西門子的網(wǎng)絡(luò)插頭和PROFIBUS電纜。在 S7-1200 CPU 通信口上使用西門子網(wǎng)絡(luò)插頭。
PROFIBUS 電纜的紅色導(dǎo)線B 即 RS 485 信號(hào) +,此信號(hào)應(yīng)當(dāng)連接到 MM 440 通信端口的 P+;綠色導(dǎo)線A 即 RS 485 信號(hào) -,此信號(hào)應(yīng)當(dāng)連接到 MM 440 通信端口的 N-。
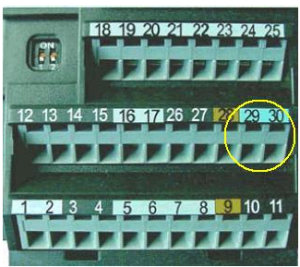

圖1: MM440接線端子 表4:MM440端子定義
因?yàn)镸M 440 通信口是端子連接,所以 PROFIBUS 電纜不需要網(wǎng)絡(luò)插頭,而是剝出線頭直接壓在端子上。如果還要連接下一個(gè)驅(qū)動(dòng)裝置,則兩條電纜的同色芯線可以壓在同一個(gè)端子內(nèi)。PROFIBUS 電纜的紅色芯線應(yīng)當(dāng)壓入端子 29;綠色芯線應(yīng)當(dāng)連接到端子 30,如圖1、表4所示。完整接線圖如圖2所示。

圖2: S7-1200與MM440接線圖
a. 屏蔽/保護(hù)接地母排,或可靠的多點(diǎn)接地。此連接對(duì)抑制干擾有重要意義。
b. PROFIBUS 網(wǎng)絡(luò)插頭,內(nèi)置偏置和終端電阻。
c. MM 440 端的偏置和終端電阻。
d. 通信口的等電位連接。可以保護(hù)通信口不致因共模電壓差損壞或通信中斷。
e. 雙絞屏蔽電纜(PROFIBUS)電纜,因是高速通信,電纜的屏蔽層須雙端接地(接 PE)。
注意,以下幾點(diǎn)對(duì)網(wǎng)絡(luò)的性能有極為重要的影響。幾乎所有網(wǎng)絡(luò)通信質(zhì)量方面的問題都與未考慮到下列事項(xiàng)有關(guān):
? 偏置電阻用于在復(fù)雜的環(huán)境下確保通信線上的電平在總線未被驅(qū)動(dòng)時(shí)保持穩(wěn)定;終端電阻用于吸收網(wǎng)絡(luò)上的反射信號(hào)。一個(gè)完善的總線型網(wǎng)絡(luò)在兩端接偏置和終端電阻。
? 通信口 M 的等電位連接建議單獨(dú)采用較粗的導(dǎo)線 ,而不要使用 PROFIBUS 的屏蔽層,因?yàn)榇诉B接上可能有較大的電流,以致通信中斷。
? PROFIBUS 電纜的屏蔽層要盡量大面積接 PE。一個(gè)實(shí)用的做法是在靠近插頭、接線端子處環(huán)剝外皮,用壓箍將裸露的屏蔽層壓緊在 PE 接地體上(如 PE 母排或良好接地的裸露金屬安裝板)。
? 通信線與動(dòng)力線分開布線;緊貼金屬板安裝也能抗干擾能力。驅(qū)動(dòng)裝置的輸入/輸出端要盡量采用濾波裝置,并使用屏蔽電纜。
? 在 MM 440 的包裝內(nèi)提供了終端偏置電阻元件,接線時(shí)可按說明書直接壓在端子上。如果可能,可采用熱縮管將此元件包裹,并適當(dāng)固定。
3. 組態(tài)
我們通過下述的實(shí)際操作來介紹如何在Step7 Basic V10.5 中組態(tài)S7-1214C 和MM440變頻器的USS通信。
3.1. PLC 硬件組態(tài)
首先在Step7 Basic V10.5中建立一個(gè)項(xiàng)目,如圖3所示。

圖3: 新建S7 1200項(xiàng)目
在硬件配置中,添加CPU1214C和通信模塊CM1241 RS485模塊,如圖4所示:

圖4: S7 1200硬件配置
在CPU的屬性中,設(shè)置以太網(wǎng)的IP地址,建立PG與PLC的連接,如圖5所示。

圖5: S7 1200 IP地址的設(shè)置
3.2. MM440參數(shù)設(shè)置
我們假定已經(jīng)完成了驅(qū)動(dòng)裝置的基本參數(shù)設(shè)置和調(diào)試(如電機(jī)參數(shù)辨識(shí)等等),以下只涉及與 S7-1200 控制器連接相關(guān)的參數(shù)。
MM 440 的參數(shù)分為幾個(gè)訪問級(jí)別,以便于過濾不需要查看的部分。 與 S7-1200 連接時(shí),需要設(shè)置的主要有“控制源”和“設(shè)定源”兩組參數(shù)。要設(shè)置此類參數(shù),需要“專家”參數(shù)訪問級(jí)別,即首先需要把 P0003 參數(shù)設(shè)置為 3。
控制源參數(shù)設(shè)置:
控制命令控制驅(qū)動(dòng)裝置的啟動(dòng)、停止、正/反轉(zhuǎn)等功能。控制源參數(shù)設(shè)置決定了驅(qū)動(dòng)裝置從何種途徑接受控制信號(hào),如表5所示。

表5:控制源由參數(shù) P0700 設(shè)置
此參數(shù)有分組,在此僅設(shè)一組,即 P0700[0]。
設(shè)定源控制參數(shù):
設(shè)定值控制驅(qū)動(dòng)裝置的轉(zhuǎn)速/頻率等功能。設(shè)定源參數(shù)決定了驅(qū)動(dòng)裝置從哪里接受設(shè)定值(即給定),如表6所示。

表6:設(shè)定源由參數(shù) P1000 設(shè)置
此參數(shù)有分組,在此僅設(shè)一組,即 P1000[0]。
控制源和設(shè)定源之間可以自由組合,根據(jù)工藝要求可以靈活選用。我們以控制源和設(shè)定源都來自 COM Link 上的 USS 通信為例,簡(jiǎn)介 USS 通信的參數(shù)設(shè)置。
主要參數(shù)有:
1. P0700: 設(shè)置 P0700[0] = 5,即控制源來自 COM Link 上的 USS 通信;
2. P1000: 設(shè)置 P1000[0] = 5,即設(shè)定源來自 COM Link 上的 USS 通信;
3. P2009: 決定是否對(duì) COM Link 上的 USS 通信設(shè)定值規(guī)格化,即設(shè)定值將是運(yùn)轉(zhuǎn)頻率的百分比形式,還是頻率值。為0,不規(guī)格化 USS 通信設(shè)定值,即設(shè)定為MM440中的頻率設(shè)定范圍的百分比形式;為1,對(duì) USS 通信設(shè)定值進(jìn)行規(guī)格化,即設(shè)定值為的頻率數(shù)值;
4. P2010: 設(shè)置 COM Link 上的 USS 通信速率。根據(jù) S7-1200 通信口的限制,支持的通信波特率如表7所示。
| 4 | 2400 bit/s |
| 5 | 4800 bit/s |
| 6 | 9600 bit/s |
| 7 | 19200 bit/s |
| 8 | 38400 bit/s |
| 9 | 57600 bit/s |
| 12 | 115200 bit/s |
表7:通信波特率
5. P2011: 設(shè)置 P2011[0] = 0 至 31,即驅(qū)動(dòng)裝置 COM Link 上的 USS 通信口在網(wǎng)絡(luò)上的從站地址;
6. P2012: 設(shè)置 P2012[0] = 2,即 USS PZD 區(qū)長度為 2 個(gè)字長;
7. P2013: 設(shè)置 P2013[0] = 4;
8. P2014: 設(shè)置 P2014[0] = 0 至 65535,即 COM Link 上的 USS 通信控制信號(hào)中斷超時(shí)時(shí)間,單位為 ms;如設(shè)置為 0,則不進(jìn)行此端口上的超時(shí)檢查;
9. P0971: 設(shè)置 P0971 = 1,上述參數(shù)將保存入MM 440 的 EEPROM 中。
4. USS通信原理與編程的實(shí)現(xiàn)
4.1 S7 1200 PLC與MM440 通過USS通信的基本原理
S7 1200提供了專用的USS庫進(jìn)行USS通信,如圖6所示:

圖6:S7 1200 專用的USS庫
USS_DRV功能塊通過USS_DRV_DB數(shù)據(jù)塊實(shí)現(xiàn)與USS_PORT功能塊的數(shù)據(jù)接收與傳送,而USS_PORT功能塊是S7-1200 PLC CM1241 RS485模塊與MM440之間的通信接口。USS_RPM功能塊和USS_WPM功能塊與MM440的通信與USS_DRV功能塊的通信方式是相同的。如圖7所示。

圖7:通信結(jié)構(gòu)圖
4.2. 功能塊使用介紹
USS_DRV 功能塊是S7-1200 USS通信的主體功能塊,接受MM440的信息和控制MM440的指令都是通過這個(gè)功能快來完成的。在主 OB中調(diào)用。
USS_PORT功能塊是S7-1200與MM440進(jìn)行USS通信的接口,主要設(shè)置通信的接口參數(shù)。可在主OB或中斷OB中調(diào)用。
USS_RPM功能塊是通過USS通信讀取MM440的參數(shù)。在主 OB中調(diào)用。
USS_WPM功能塊是通過USS通信設(shè)置MM440的參數(shù)。在主 OB中調(diào)用。
4.3. S7 1200 PLC進(jìn)行USS通信的編程
4.3.1. USS_DRV功能塊的編程
USS_DRV功能塊的編程如圖8所示。

圖8: USS_DRV功能塊的編程
USS_DRV功能塊用來與MM440進(jìn)行交換數(shù)據(jù),從而讀取MM440的狀態(tài)以及控制MM440的運(yùn)行。每個(gè)MM440使用的一個(gè)USS_DRV功能塊,但是同一個(gè)CM1241 RS485模塊的USS網(wǎng)絡(luò)的所有MM440(多16個(gè))都使用同一個(gè)USS_DRV_DB。
| USS_DRV_DB: 指定MM440進(jìn)行USS通信的數(shù)據(jù)塊。 | |||||
| RUN: 指定DB塊的MM440啟動(dòng)指令。 | |||||
| OFF2: 緊急停止,自由停車。 該位為0時(shí)停車。 | |||||
| OFF3: 快速停車,帶制動(dòng)停車。該位為0時(shí)停車。 | |||||
| F_ACK: MM440故障確認(rèn)。 | |||||
| DIR : MM440控制電機(jī)的轉(zhuǎn)向。 | |||||
| SPEED_SP: MM440的速度設(shè)定值。 | |||||
| NDR: 新數(shù)據(jù)就緒。 | |||||
| ERROR: 程序輸出錯(cuò)誤。 | |||||
| RUN_EN: MM440運(yùn)行狀態(tài)指示。 | |||||
| D_DIR: MM440運(yùn)行方向狀態(tài)指示。 | |||||
| INHIBIT: MM440是否被禁止的狀態(tài)指示。 | |||||
| FAULT: MM440故障。 | |||||
| SPEED: MM440的反饋的實(shí)際速度值。 | |||||
| DRIVE: MM440的USS站地址。MM440參數(shù)P2011設(shè)置。 | |||||
| PZD_LEN: PZD數(shù)據(jù)的字?jǐn)?shù),值2,4,6或8個(gè)字。MM440參數(shù)P2012設(shè)置。 | |||||
4.3.2. USS通信接口參數(shù)功能塊的編程
USS通信接口參數(shù)功能塊的編程如圖9所示。

圖9: USS通信接口參數(shù)功能塊的編程
USS_PORT功能塊用來處理USS網(wǎng)絡(luò)上的通信,它是S71200 CPU與MM440的通信接口。每個(gè)CM1241 RS485模塊有且有一個(gè)USS_PORT功能塊。
PORT: 通信模塊標(biāo)識(shí)符:在默認(rèn)變量表的“常量”(Constants) 選項(xiàng)卡內(nèi)引用的常量。
BAUD: 指的是和MM440進(jìn)行通行的速率。 MM440的參數(shù)P2010種進(jìn)行設(shè)置。
USS_DB: 引用在用戶程序中放置 USS_DRV 指令時(shí)創(chuàng)建和初始化的背景數(shù)據(jù)塊。
ERROR: 輸出錯(cuò)誤。
STATUS:掃描或初始化的狀態(tài)。
USS_PORT 功能通過RS485通信模塊處理 CPU 和變頻器之間的實(shí)際通信。 每次調(diào)用此功能可處理與一個(gè)變頻器的一次通信。 用戶程序盡快調(diào)用此功能以防止與變頻器通信超時(shí)。 可在主 OB 或任何中斷 OB 中調(diào)用此功能。通常從循環(huán)中斷 OB 調(diào)用USS_PORT 以防止變頻器超時(shí)以及使 USS_DRV 調(diào)用的 USS 數(shù)據(jù)保持新。
S7-1200 PLC與MM440的通信是與它本身的掃描周期不同步的,在完成一次與MM440的通信事件之前,S7-1200通常完成了多個(gè)掃描。
USS_PORT通信的時(shí)間間隔是S7-1200與MM440通信所需要的時(shí)間,不同的通信波特率對(duì)應(yīng)的不同的USS_PORT通信間隔時(shí)間。表8列出了不同的波特率對(duì)應(yīng)的USS_PORT通信間隔時(shí)間。

表8:不同的波特率對(duì)應(yīng)的USS_PORT小通信間隔時(shí)間
USS_PORT在發(fā)生通信錯(cuò)誤時(shí),通常進(jìn)行3次嘗試來完成通信事件,那么S7-1200與MM440通信的時(shí)間就是USS_PORT發(fā)生通信超時(shí)的時(shí)間間隔。例如:如果通信波特率是9600,那么USS_PORT與MM440通信的時(shí)間間隔應(yīng)當(dāng)大于小的調(diào)用時(shí)間間隔,即大于116.3毫秒而小于349毫秒。S7-1200 USS 協(xié)議庫默認(rèn)的通信錯(cuò)誤超時(shí)嘗試次數(shù)是2次。
基于以上的USS_PORT通信時(shí)間的處理,建議在循環(huán)中斷OB塊中調(diào)用USS_PORT通信功能塊。在建立循環(huán)中斷OB塊時(shí),我們可以設(shè)置循環(huán)中斷OB塊的掃描時(shí)間,以滿足通信的要求。循環(huán)中斷OB塊的掃描時(shí)間的設(shè)置如圖10所示:

圖10:循環(huán)中斷OB塊的掃描時(shí)間的設(shè)置
4.3.3. USS_RPM功能塊的編程
USS_RPM功能塊的編程 如圖11所示。

圖11:USS_RPM功能塊的編程
USS_RPM功能塊用于通過USS通信從MM440讀取參數(shù)。
| REQ: 讀取參數(shù)請(qǐng)求。 | |||
| DRIVE: MM440的USS站地址。 | |||
| PARAM: MM440的參數(shù)代碼。 | |||
| INDEX: MM440的參數(shù)索引代碼 | |||
| USS_DB:指定MM440進(jìn)行USS通信的數(shù)據(jù)塊。 | |||
| DONE: 讀取參數(shù)完成。 | |||
| ERROR: 讀取參數(shù)錯(cuò)誤。 | |||
| STATUS:讀取參數(shù)狀態(tài)代碼。 | |||
| VALUE: 所讀取的參數(shù)的值。 | |||
注意:進(jìn)行讀取參數(shù)功能塊編程時(shí),各個(gè)數(shù)據(jù)的數(shù)據(jù)類型一定要正確對(duì)應(yīng)。
4.3.4. USS_WPM功能塊的編程
USS_WPM功能塊的編程如圖12所示。

圖12:USS_WPM功能塊的編程
USS_WPM功能塊用于通過USS通信設(shè)置MM440的參數(shù)。
| REQ: 寫參數(shù)請(qǐng)求。 | |||
| DRIVE: MM440的USS站地址。 | |||
| PARAM: MM440的參數(shù)代碼。 | |||
| INDEX: MM440的參數(shù)索引代碼。 | |||
| EEPROM:把參數(shù)存儲(chǔ)到MM440的EEPROM。 | |||
| VALUE: 設(shè)置參數(shù)的值。 | |||
| USS_DB:指定MM440進(jìn)行USS通信的數(shù)據(jù)塊。 | |||
| DONE: 讀取參數(shù)完成。 | |||
| ERROR: 讀取參數(shù)錯(cuò)誤狀態(tài)。 | |||
注意:對(duì)寫入?yún)?shù)功能塊編程時(shí),各個(gè)數(shù)據(jù)的數(shù)據(jù)類型一定要正確對(duì)應(yīng)。
4.3.5. 常見錯(cuò)誤
如果讀寫同時(shí)使能,則報(bào)錯(cuò)818A:參數(shù)請(qǐng)求通道正在被本變頻器的另一請(qǐng)求占用。如圖13所示。

圖13:讀寫同時(shí)使能報(bào)錯(cuò)
如果通信斷開,則PORT報(bào)錯(cuò)818B,如圖14所示。

圖14:通信斷開報(bào)錯(cuò)
如果速度設(shè)定值不正確,則報(bào)錯(cuò)8186,如圖15所示。

圖15:速度設(shè)定值錯(cuò)誤
官網(wǎng)")
